Two STM32F103x boards changing CAN messages with the driver I developed (sources in arm-makefile repo):
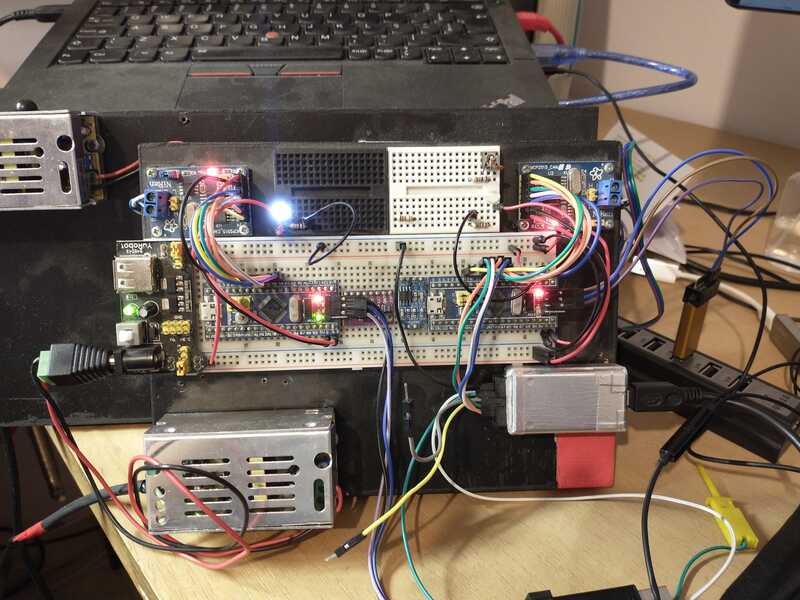
Capturing the CAN signal with an oscilloscope:
Capturing the SPI signal (CLK, MISO, MOSI and CS) and then the MCP2515 reacting sending the signal to the transceiver (TXD and RXD):
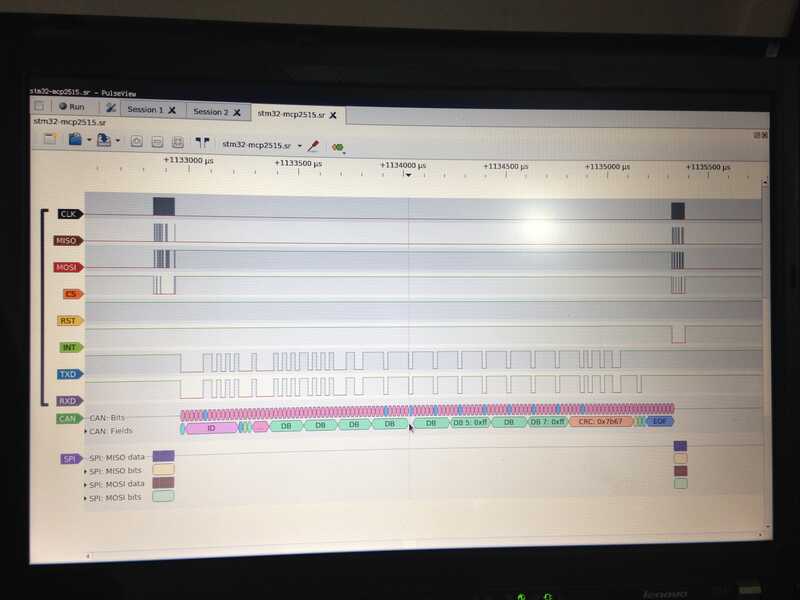
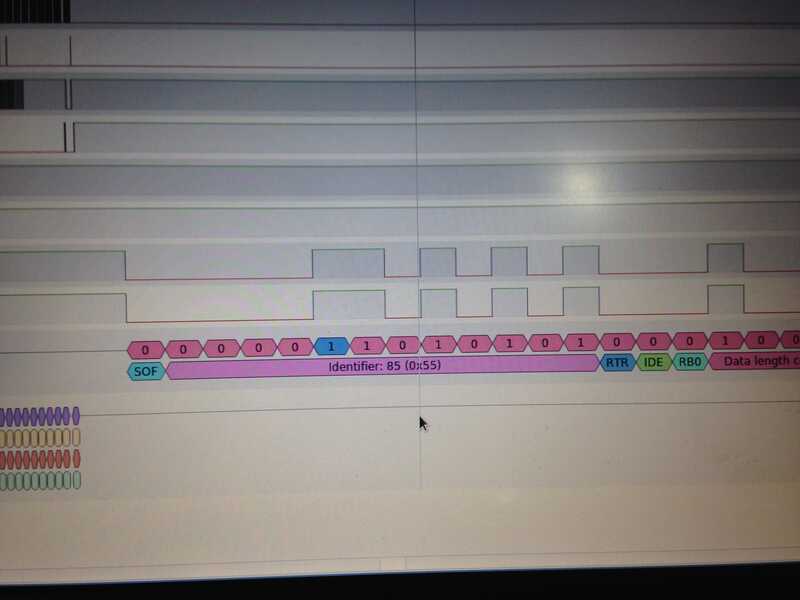
Detail of the CAN signal captured with sigrok-cli and viewed with pulseview:
The FTDI FT232H and FT2232H (2 channels), which will be used to develop an user space version of the driver (MPSSE, USB->SPI) to communicate with MCP2515:

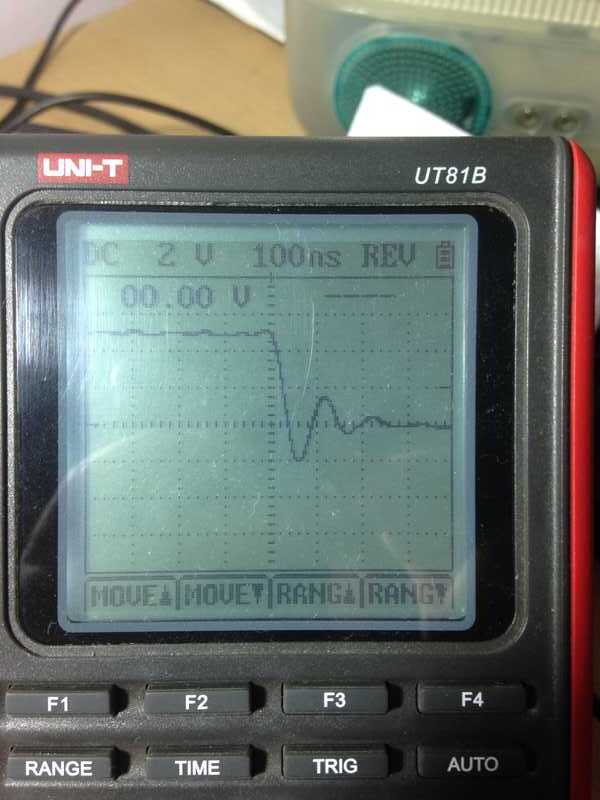
Random, measuring an overshoot when there were problems with an interrupt on a pin:
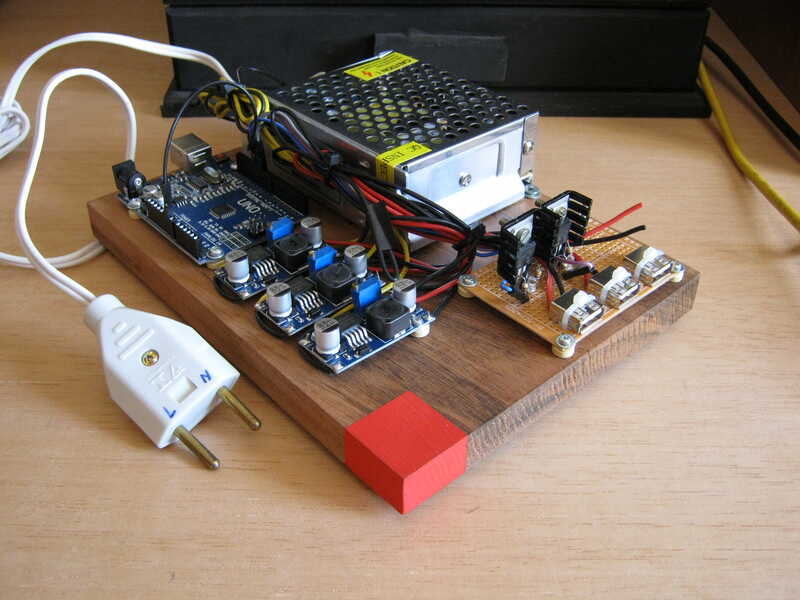
rswtch (remote switch project), also documented here:
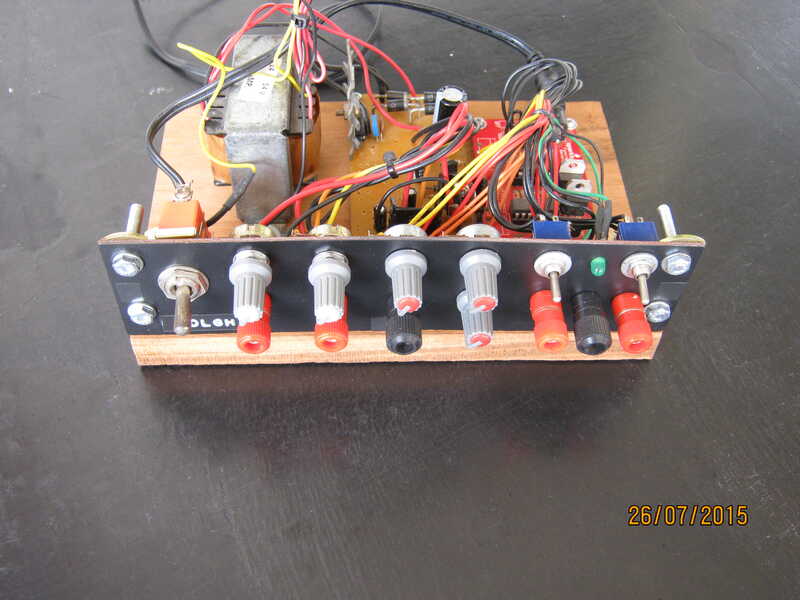
A signal generator:
Cubieboard 2 and Wandboard, to compile the kernels and boot via PXE:

Orange Pi R1 working as a router:
